- 26 Juli 2021
- 1
- 1
- E-Scooter
- Ninebot max G30D
Hallo liebe Rollerplausch-Community,
vielen Dank für die Aufnahme im Forum.
Ich möchte mich gerne kurz Vorstellen. Ich bin 50 Jahre alt und habe ein neues Hobby gesucht und stehe insgesamt voll auf (E-)Mobilty. Hatte vorher einen Can-Am Spyder den ich nun verkauft habe und dafür diesen schönen Scooter (deutlich günstiger ;-). An E-Mobility fahre ich leidenschaftlich gerne mein Evolve GTR-E-Longboard und nun noch einen Ninebot Max G30D II.
Der Roller ist wirklich klasse - nicht so gefährlich wie das Longboard - und macht einen Riesenspaß.
Ich selbst bin Fachinformatiker (wobei ich schon lange nicht mehr in dem Job arbeite), dennoch kann ich mich für Technik und Programmierung sehr begeistern und bin durch den entsprechenden Hintergrund nicht völlig unbedarft. ;-)
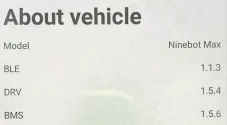
Ich habe mich in das Thema Optimierung eingelesen, dennoch habe ich eine Verständnisfrage zu den drei Firmwares auf dem Scooter (DRV, BLE und BMS).
Mein Scooter hat die DRV in Version 1.54 aufgespielt, Updates habe ich keine gemacht. Da sich sämtliche Optimierungsthemen immer auf die DRV beziehen, frage ich mich, ob die DRV-Vanilla-Version 1.26 soweit kompatibel zu den aufgespielten BLE (in Version 1.13 auf dem Roller) sowie BMS (Version 1.56) ist und mit diesen kommunizieren kann. Gibt es vielleicht dazu irgendwo eine Art Compatibilty-Chart?
D.h. wenn ich eine Custom FW erstelle und DRV 1.26 als Basis nehme, kann BME und BLE dann mit dieser reibungslos kommunizieren, oder enthält die Vanilla bereits auch passende BMS und BLE Versionen, dass dies funktioniert bzw. werden diese automatisch mit überspielt? Möchte den Scooter halt nicht durch einen Custom-Build ausser Betrieb setzen, mein Sohn wäre unsagbar traurig.
Ich bedanke mich ganz herzlich im Vorfeld für eine Antwort.
LG, CptElevator aus Bremen.
vielen Dank für die Aufnahme im Forum.
Ich möchte mich gerne kurz Vorstellen. Ich bin 50 Jahre alt und habe ein neues Hobby gesucht und stehe insgesamt voll auf (E-)Mobilty. Hatte vorher einen Can-Am Spyder den ich nun verkauft habe und dafür diesen schönen Scooter (deutlich günstiger ;-). An E-Mobility fahre ich leidenschaftlich gerne mein Evolve GTR-E-Longboard und nun noch einen Ninebot Max G30D II.
Der Roller ist wirklich klasse - nicht so gefährlich wie das Longboard - und macht einen Riesenspaß.
Ich selbst bin Fachinformatiker (wobei ich schon lange nicht mehr in dem Job arbeite), dennoch kann ich mich für Technik und Programmierung sehr begeistern und bin durch den entsprechenden Hintergrund nicht völlig unbedarft. ;-)
Ich habe mich in das Thema Optimierung eingelesen, dennoch habe ich eine Verständnisfrage zu den drei Firmwares auf dem Scooter (DRV, BLE und BMS).
Mein Scooter hat die DRV in Version 1.54 aufgespielt, Updates habe ich keine gemacht. Da sich sämtliche Optimierungsthemen immer auf die DRV beziehen, frage ich mich, ob die DRV-Vanilla-Version 1.26 soweit kompatibel zu den aufgespielten BLE (in Version 1.13 auf dem Roller) sowie BMS (Version 1.56) ist und mit diesen kommunizieren kann. Gibt es vielleicht dazu irgendwo eine Art Compatibilty-Chart?
D.h. wenn ich eine Custom FW erstelle und DRV 1.26 als Basis nehme, kann BME und BLE dann mit dieser reibungslos kommunizieren, oder enthält die Vanilla bereits auch passende BMS und BLE Versionen, dass dies funktioniert bzw. werden diese automatisch mit überspielt? Möchte den Scooter halt nicht durch einen Custom-Build ausser Betrieb setzen, mein Sohn wäre unsagbar traurig.
Ich bedanke mich ganz herzlich im Vorfeld für eine Antwort.
LG, CptElevator aus Bremen.