- 8 August 2022
- 95
- 148
- E-Scooter
- G30D2 STM32 48V
Seit der SHU 2.2.1 / SHFW 0.3.1 gibt es das Feature "Field Weakening". Funktionsprinzip und Wirkungsweise der Parameter für Field Weakening sind in der Anleitung hier kurz und knapp beschrieben. Wie vermutlich viele von Euch hat mich interessiert, was dahinter steckt, d.h. wie die Field Weakening Parameter wirken. Inzwischen glaube ich, dass ich es (zumindest oberflächlich) halbwegs verstanden habe, dank einiger essentieller Hinweise von
 Paulederbaus - vielen Dank dafür!
Paulederbaus - vielen Dank dafür!
Die Sache ist tatsächlich ganz schön kompliziert; ich versuche, die Zusammenhänge so verständlich wie möglich zu beschreiben, auch anhand zweier Diagramme, die die Zusammenhänge verdeutlichen sollen. Jede Änderung in den Parametern verändert allerdings die Kurven in den Diagrammen, insofern diese bitte nur als Prinzipbilder verstehen...
Die Kurven in den folgenden Diagrammen basieren auf folgenden Einstellungen (diese sind als Beispiel zu verstehen, nicht als Empfehlung):
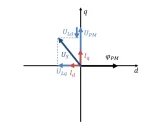
Mit Field Weakening gibt es 2 Stromanteile im komplexen Raum:
- Strom für das Drehmoment Iq (Wirkstrom, Realteil)
- Strom für Field Weakening / "Flux current" Id (Blindstrom, Imaginärteil)

Deshalb werden in der Firmware die Ströme so weit reduziert, dass die Formel WURZEL(Iq_Bedarf² + Id_Bedarf²) wieder den hardwareseitig möglichen Maximalstrom 25A ergibt, d.h. beide Stromanteile werden "gleichberechtigt" um einen Faktor f reduziert:
f = 25A / WURZEL(Iq_Bedarf^2 + Id_Bedarf^2)
Der Faktor f nimmt mit zunehmender Geschwindigkeit ab. Es gilt f ≤ 1 (d.h. f wird wird auf 1 begrenzt → falls die Formel einen Wert >1 ergibt, dann bleibt f = 1).
Nun kann man die Ströme in einem Diagramm visualisieren.
Dargestellt sind 4 Kurven:
Je größer die Werte für IC und VC sind, desto mehr Strom wird für Field Weakening benötigt und "fehlt" für den Vortrieb.
In meinen Messreihen habe ich persönlich die besten & ausgewogensten Ergebnisse mit eher konservativen Werten erzielt. Insofern würde ich die hier geposteten Einstellungen von FMJ als Startpunkt empfehlen.
FMJ als Startpunkt empfehlen.
Grüße aus dem wilden Süden
P.S.: Hinweis v.a. an die Männer unter Euch: Denkt dran - Helm auf, wenn Ihr nicht für den Darwin Award kandidieren wollt
")
Die Sache ist tatsächlich ganz schön kompliziert; ich versuche, die Zusammenhänge so verständlich wie möglich zu beschreiben, auch anhand zweier Diagramme, die die Zusammenhänge verdeutlichen sollen. Jede Änderung in den Parametern verändert allerdings die Kurven in den Diagrammen, insofern diese bitte nur als Prinzipbilder verstehen...
Funktionsprinzip Field Weakening (FW)
Die Drehung des Motors erzeugt ein elektrisches Feld, das der Bewegung entgegen wirkt. Beim Field Weakening wird ein entgegengesetztes Feld erzeugt, so dass dieser Widerstand reduziert wird (irgendwie so ähnlich wie bei Noise Cancellation Kopfhörern). Field Weakening ermöglicht also höhere Höchstgeschwindigkeiten, was allerdings zulasten der Effizienz (Wärmeentwicklung) und des Drehmoments des Rollers geht.Die Kurven in den folgenden Diagrammen basieren auf folgenden Einstellungen (diese sind als Beispiel zu verstehen, nicht als Empfehlung):
| Parameter | Wert | Bemerkung |
| Max DPC current [A] (peak) | 28 | maximaler Wert aus der Gaskurve |
| Max DPC current [A] (eff) | 19,8 | Effektivwert = Peak Wert * Wurzel(2) |
| BMS Limit I_lim [A] | 25 | Harte Begrenzung durch Serien-BMS |
| Start speed [km/h] | 22 | FW Parameter in SHU: Geschwindigkeit bei der FW einsetzt |
| Initial current IC [A] | 2 | FW Parameter in SHU: Strom beim Einsetzen von FW |
| Variable current VC [mA/(km/h)] | 1200 | FW Parameter in SHU: Anstieg des Stroms über der Geschwindigkeit oberhalb der Einsetzgeschwindigkeit |
Mit Field Weakening gibt es 2 Stromanteile im komplexen Raum:
- Strom für das Drehmoment Iq (Wirkstrom, Realteil)
- Strom für Field Weakening / "Flux current" Id (Blindstrom, Imaginärteil)
Diagramm 1: Strombedarf
- Blau: Der Strombedarf für Field Weakening folgt einer Geraden mit dem Achsenabschnitt Initial Current (IC) bei der Start Speed, und mit der Steigung = Variable Current (VC), also
Id_Bedarf = 0 wenn Geschwindigkeit ≤ Start_Speed
Id_Bedarf = IC + VC / 1000 * (Geschwindigkeit - Start_Speed) wenn Geschwindigkeit > Start_Speed
- Rot: Der Strombedarf für das Drehmoment ist der maximale Wert aus der DPC Gaskurve multipliziert mit WURZEL(2):
Iq_Bedarf = 28.000mA * 1,41 = 19,8A
Deshalb werden in der Firmware die Ströme so weit reduziert, dass die Formel WURZEL(Iq_Bedarf² + Id_Bedarf²) wieder den hardwareseitig möglichen Maximalstrom 25A ergibt, d.h. beide Stromanteile werden "gleichberechtigt" um einen Faktor f reduziert:
f = 25A / WURZEL(Iq_Bedarf^2 + Id_Bedarf^2)
Der Faktor f nimmt mit zunehmender Geschwindigkeit ab. Es gilt f ≤ 1 (d.h. f wird wird auf 1 begrenzt → falls die Formel einen Wert >1 ergibt, dann bleibt f = 1).
Nun kann man die Ströme in einem Diagramm visualisieren.
Diagramm 2: Strom-Management und maximale Geschwindigkeit
- Blau: Maximal möglicher Strom für Field Weakening Id = f * Id_Bedarf
- Rot: Verbleibende Stromreserve für Drehmoment Iq = f * Iq_Bedarf
- Grün: Maximal möglicher Gesamtstrom
- Der kurvige Abschnitt ergibt sich zu Iges = WURZEL(Iq_Bedarf^2 + Id_Bedarf^2)
- Rechts davon begrenzt das Serien-BMS hart auf 25A
- Links davon begrenzt die die DPC Gaskurve
- Lila: Fahrwiderstandskennlinie
Dieser Strom wird auf ebene Strecke benötigt, um die Geschwindigkeit konstant zu halten. Die Werte habe ich experimentell ermittelt und mittels quadratischer Regression angenähert. Sie gelten für meinen Roller mit 4,5bar Reifendruck, mein Gewicht, meist ebene Strecke und wenig Wind aus unterschiedlichen Richtungen. Ich vermute, dass diese Werte wenig hardwareabhängig sind. Die größten Einflussfaktoren dürften der Luftwiderstand (Körpergröße, Kleidung) und der Rollwiderstand (Reifendruck, Untergrund) sein.
Je größer die Werte für IC und VC sind, desto mehr Strom wird für Field Weakening benötigt und "fehlt" für den Vortrieb.
Fazit
Es gilt also, für sich eine Einstellung zu finden, die einen bestmöglichen Kompromiss zwischen Maximalgeschwindigkeit und Beschleunigung, sowie zwischen Energieeffizienz (wenig Wärmeentwicklung, Dauerfestigkeit der Komponenten auch auf längeren Strecken) und Leistung darstellt. Die "eierlegende Wollmilchsau" gibt es dabei leider nicht.In meinen Messreihen habe ich persönlich die besten & ausgewogensten Ergebnisse mit eher konservativen Werten erzielt. Insofern würde ich die hier geposteten Einstellungen von
Grüße aus dem wilden Süden
P.S.: Hinweis v.a. an die Männer unter Euch: Denkt dran - Helm auf, wenn Ihr nicht für den Darwin Award kandidieren wollt
Zuletzt bearbeitet:

")

")

 komischerweise rennt mein E 25 37kmh im leerlauf und 32 aufer strasse ohne fw
komischerweise rennt mein E 25 37kmh im leerlauf und 32 aufer strasse ohne fw :
: