

Vielen Dank, kannst du gerne machenA alex_1S
Also erstmal mega gut wie logisch du an das Problem heran gegangen bist, und somit den Übeltäter (alte No KERS Mod) ausfindig machen konntest.
Absoluten Respekt dafür.
Würde dich gerne in dem ersten Post unter Danksagungen dafür erwähnen wenn das ok für dich ist.

Danke für deine ausführliche Erklärung. Nicht falsch verstehen - ich finde den neuen Beschleunigungsalgorithmus gar nicht pauschal schlecht. Wie ja hier schon erklärt wurde, sinken dadurch die Phasenströme bei niedrigen Geschwindigkeiten und man schont dadurch definitiv das Material. Auch bezüglich Reichweite gehe ich davon aus, dass sich dies positiv auswirkt, auch wenn ich noch keine Zeit hatte das vernünftig zu testen. Mache ich vielleicht mal bei schönem Wetter, also Reichweitenvergleich zwischen CFW224 und VLT319 unter gleichen Bedingungen - dauert nur etwas bei ca. 50km Reichweite pro Scooter wenn ich das nacheinander testeDeine Einstellung finde ich sehr gut.
Und jetzt kommt das Aber.
Ich möchte mit VLT einen anderen Weg einschlagen als z.b. die SHFW.
Das Beschleunigungsverhalten noch weiter zu verändern geht mir zu sehr in Richtung extrem Tuning.
Vanilla Lite Touch soll seinem Namen weiterhin gerecht sein, und nur Kleinigkeiten optimieren.
Es wäre sicherlich möglich auch die Beschleunigung komplett zu überarbeiten und/oder neu zu schreiben, aber das ist mir einfach ein zu großer Eingriff.
Außerdem macht das ja die SHFW schon sehr gut.
Dort wird auch sehr vieles neu geschrieben und meines Wissens nach auch die Beschleunigung.
Jeder dem das Vanilla Beschleunigungs-verhalten nicht mehr ausreicht, sollte meiner Meinung nach eher darüber nachdenken eine SHFW zu installieren.
Sorry wenn ich dich mit dieser Nachricht enttäusche, aber das war schon immer der Gedanke hinter den VLT-Firmwares.
Es ist nun schon häufiger von mir zur Sprache gekommen.
Ich denke darüber nach einen weiteren VLT Zweig auf zumachen.
Beispielsweise unter dem Namen VLTplus.
Dort könnte man vieles neu überdenken, wie eben auch diese Sache.
Noch ist es allerdings nicht so weit.


Mir geht es daher auch weniger darum den ganzen Algorithmus umzukrempeln oder einfach stumpf immer volle Leistung abzurufen - das ist dann wirklich Aufgabe der anderen Firmwares mit allen Vor- und Nachteilen.
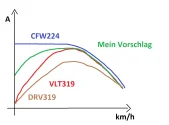
Vereinfacht gesagt (ich habe ehrlicher Weise keine Vorstellung davon wie die Regelung intern genau abläuft) hatte ich an folgendes gedacht: Über den A Mod wurde ja hier bereits die maximal abrufbare Leistung, die nach meinem Test nur bei ca. 22km/h anliegt und darunter und darüber abnimmt, angehoben. Bei etwa 3km/h, also dem ich nenne es mal langsamsten Fahrzustand des Scooters liegen nur etwa 1/6 der A an wie bei 22 km/h an (2A zu 12A).
Hier würde ich gerne ansetzen und NUR diesen Startwert anheben auf z.B. 1/3 der A, also im meinem Fall 4A.
Danach soll der Algorithmus genauso weitermachen wie bisher, nur eben von einem höheren Startpunkt aus.
Keine Ahnung ob das so verständlich ausgedrückt ist, ich habe das ganze im Anhang mal visualisiert.
Wenn das deiner Meinung nach dann in eine VLT-Plus gehört, akzeptiere ich das selbstverständlich.
Wird also kein CRC-Regler Mod mehr kommen? Mist! Hatte mich schon so drauf gefreut
Hier denke ich, dass kein großer Vorteil zu erzielen sein wird (wenn man über 1000 geht, da dieser Wert bereits recht hoch ist), anders als bei den alten CFWs.Das ist jedenfalls kein großer Eingriff in den Beschleunigungs Algorithmus.
Hier muss nur der Wert dynamisch aus dem Register geladen werden anstatt dem fest verankerten wert.
Soweit ich die Regelung bisher verstanden habe, hat früher NUR die CRC bestimmt, wie schnell der Scooter auf Gasbefehle reagiert, dementsprechend extrem spürbar waren die Auswirkungen von CRC. Wie man in der Grafik unten sieht, war es früher eben so, dass auch bei Schrittgeschwindigkeit die maximale Leistung abgerufen werden konnte und die CRC sozusagen entschied, wie lange es dauert bis diese anliegen. Selbst wenn wir jetzt auf CRC 16000 gehen, wird der Scooter nicht mehr Leistung beim Beschleunigen freigeben.
Genau diesen Bumms der alten CFWs wird man hier also nicht erreichen können, da auch mit CRC 16000 im Stand nur ein minimaler Strom freigegeben wird.CRC = frei übersetzt: in wie vielen Schritten bis zur max. Stromstärke. Das ist unabhängig vom Modell. Je weniger Schritte, umso mehr "bumms" beim Anfahren.
Bis zur drv223 hieß es, der max. einstellbare Wert beträgt 16000 (nein, keine Null zuviel), aber mehr als ca. 1500 ist bei Stop&Go bzw. langsamen, engen Passagen oder im Prinzip überall, wo man gefühlvoll fahren muss, nicht mehr wirklich händelbar, da er schon bei mininmaler Gashebel-Bewegung einen entsprechenden Satz nach vorne macht.
Beim Auto sagte man früher "Känguru-Sprit getankt?"
Post automatically merged:
nandtek cooles Easter Egg!
")
")

")